
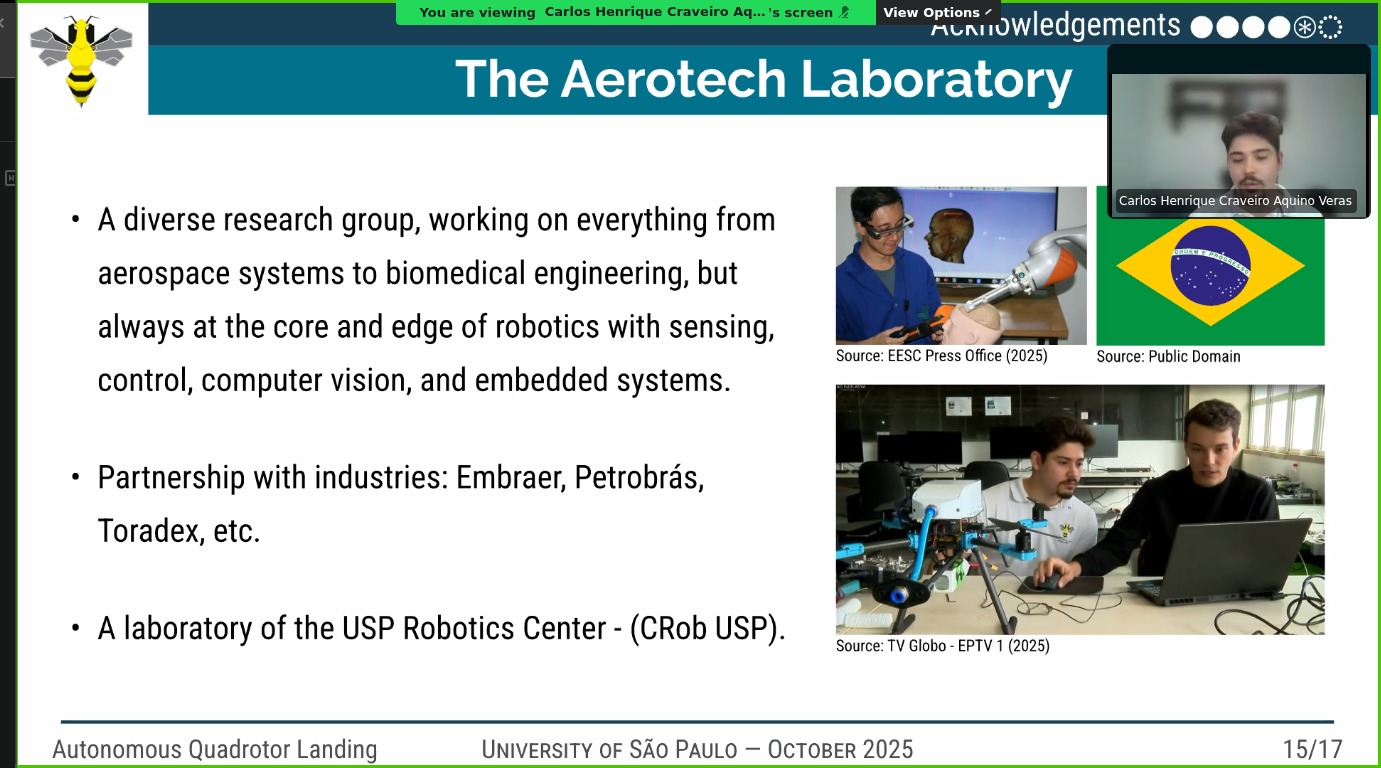
Único representante de uma universidade latino-americana, estudante de Engenharia de Computação, divulga trabalho desenvolvido no Aerotech Lab, com apoio Fapesp, para um público internacional de jovens pesquisadores em robótica aérea. O curso de Engenharia de Computação é Interunidades da Escola de Engenharia de São Carlos (EESC) e do Instituto de Ciências Matemáticas e de Computação (ICMC).
O aluno de Engenharia de Computação, Carlos Henrique Craveiro Aquino Veras, apresentou de forma remota, no dia 25 de outubro de 2025, às 21h40 (horário de Brasília), resultados de seu projeto de iniciação científica durante o Workshop on Advanced Aerial Robotics, organizado pelo Dragon Lab, laboratório de pesquisa em robótica aérea da Universidade de Tóquio, Japão. No Japão, a apresentação ocorreu às 9h40 da manhã do dia 26 de outubro.
O workshop reuniu pesquisadores para discutir avanços em manipulação aérea, controle, percepção e operação de aeronaves autônomas em cenários complexos (Workshop on Advanced Aerial Robotics | Dragon Lab).
Carlos foi o único estudante de uma universidade latino-americana convidado a expor seu trabalho no evento, o que deu visibilidade internacional tanto à USP quanto à própria EESC e ICMC. Segundo ele, estar em uma vitrine como essa, sendo graduando, apresentando lado a lado com alunos de pós-graduação e jovens pesquisadores de instituições de ponta, ajuda a mostrar para a comunidade internacional a qualidade da pesquisa que é desenvolvida aqui.
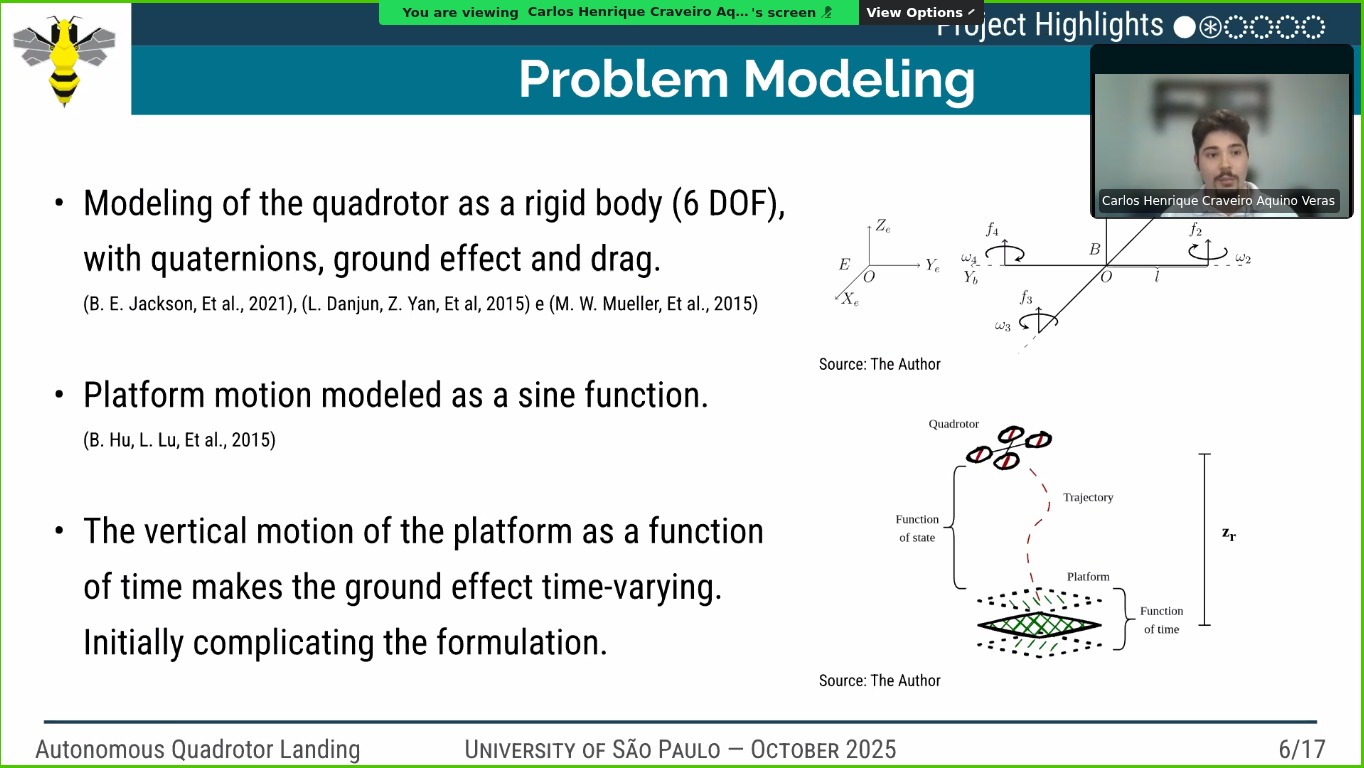
A apresentação de Carlos, intitulada Autonomous Quadrotor Landing on Ship-Borne Oscillating Platforms, abordou estratégias de controle para permitir o pouso autônomo e seguro de veículos aéreos não tripulados do tipo quadrirrotor em plataformas móveis sujeitas a oscilações, como o convés de um navio no mar. O trabalho é derivado de seu projeto de Iniciação Científica, desenvolvido no Aerotech Lab da EESC sob orientação do professor titular Glauco Augusto de Paula Caurin, do Departamento de Engenharia Aeronáutica. O projeto é financiado pela Fundação de Amparo à Pesquisa do Estado de São Paulo (Fapesp) como bolsa de Iniciação Científica, com foco em controle preditivo aplicado a pousos em plataformas oscilantes (None).
O professor Caurin atua na área de sistemas mecatrônicos autônomos e robótica aplicada. Ele é professor titular do Departamento de Engenharia Aeronáutica da EESC-USP e orienta projetos em diversas áreas como sistemas aéreos autônomos, controle, sistemas embarcados, entre outros.
Formato do workshop
O Workshop on Advanced Aerial Robotics foi estruturado em duas partes.
1- Sessão principal
Sete jovens pesquisadores em destaque internacional, de instituições como Universidade de Tóquio, Universidade de Toronto, Universidade de Bristol, Universidade Nacional de Singapura e Universidade Nacional de Seul, apresentaram palestras de aproximadamente 30 minutos cada. Essas apresentações mostraram pesquisas em andamento em robótica aérea avançada e autonomia de voo.
2- Sessão técnica de estudantes e jovens pesquisadores
Série de apresentações curtas, com cerca de 15 minutos, voltadas a trabalhos em desenvolvimento. Participaram principalmente alunos de pós-graduação de universidades como MIT, University of California, Berkeley, University of Nebraska-Lincoln e Colorado School of Mines.
Nesse segundo bloco que Carlos representou a EESC-USP como aluno de graduação, apresentando resultados obtidos em sua iniciação científica.
Impacto institucional
A participação serviu também para divulgar internacionalmente o trabalho em robótica aérea desenvolvido no Aerotech Lab da EESC e no Centro de Robótica da USP (Crob). Como único representante de uma universidade latino-americana entre os apresentadores, Carlos levou o nome da USP e da Escola de Engenharia de São Carlos a um público formado por jovens pesquisadores e futuros líderes acadêmicos na área.