


Neurocirurgia e Neurologia: AeroTech Lab busca inovações com foco em epilepsia

Coordenado pelo professor Glauco Caurin, o AeroTech Lab, da Escola de Engenharia de São Carlos (EESC) da USP, tem se dedicado por meio de sua equipe de atuação aos desafios na área de Neurocirurgia e Neurologia com foco em Epilepsia. A equipe do laboratório, que busca inovações nessa área multidisciplinar de pesquisa, é composta por 14 alunos de graduação (Trabalho de Conclusão de Curso - TCC, Iniciação Científica – IC e Estágio), quatro pesquisadores de pós-graduação (mestrado e doutorado) e um pós-doutorando, todos organizados em diferentes projetos: EpyBand, NeuroBot, NeuroNav e VCranium.
Avanços com dispositivos vestíveis para detecção e caracterização de crises epiléticas vêm se tornando cada vez mais relevantes. Com isso, o projeto Epyband busca por meio de uma pulseira eletrônica, desenvolvida no AeroTech, realizar a aquisição de dados em tempo real de pacientes com epilepsia através da análise de seus movimentos. Esse projeto é desenvolvido por meio de uma da parceria com o Centro de Cirurgia de Epilepsia (CIREP) do Hospital das Clínicas da Faculdade de Medicina de Ribeirão Preto e com o Centro de Pesquisa em Óptica e Fotônica (CEPOF), ambos da USP.
O projeto NeuroBot é um sistema para neurocirurgia robótica atuando, inicialmente, no auxílio à tarefa de localização das zonas epileptogênicas de forma precisa e segura. O foco é o procedimento de SEEG (Estéreo-Eletroencefalograma ou estéreo-EEG, diferentemente do EEG que é superficial, no couro cabeludo, o estéreo, insere um conjunto de eletrodos) para a inserção de um conjunto eletrodos no encéfalo para mapeamento e localização do foco epiléptico.
O NeuroBot foi projetado para trabalhar com ferramentas avançadas dentro da área de robótica. Utiliza-se o robô colaborativo KUKA Iiwa LBR 14 em combinação com o sistema ROS. “Com essa combinação, a comunicação com diferentes periféricos como câmeras, sensores e outros computadores ocorre de forma mais eficiente”, complementa o pesquisador da EESC-USP.
Atualmente, o desenvolvimento está focado no desenho e calibração de ferramentas específicas a fim de manter alta precisão como fator determinante para os procedimentos na neurocirurgia. Além disso, está sendo desenvolvida a versão simulada do NeuroBot, para a melhor segurança no planejamento e na execução da cirurgia. Esse projeto se desenvolve também em parceria com Faculdade de Medicina de Ribeirão Preto (FMRP), sob a coordenação do professor Hélio Rubens Machado, e com o Centro de Robótica (CRob) da Universidade.
“Já para a realização de cirurgias robóticas em especial, para as neurocirurgias, o seu planejamento é essencial e vem sendo feito por meio de softwares de reconstrução de imagem, visualização e neuronavegação”, relata Caurin. Desse modo, o projeto NeuroNav foi estruturado para resolver ambas as necessidades. Os trabalhos são desenvolvidos em parceira com o Departamento de Física da Faculdade de Filosofia, Ciências e Letras de Ribeirão Preto (FFCLRP) da USP, com colaboração do professor Oswaldo Baffa Filho, e fazem uso do software SlicerIGT, um aplicativo de neuronavegação capaz de se conectar a um sistema de realidade aumentada para proporcionar ao médico uma melhor experiência, além de auxiliar o planejamento cirúrgico.
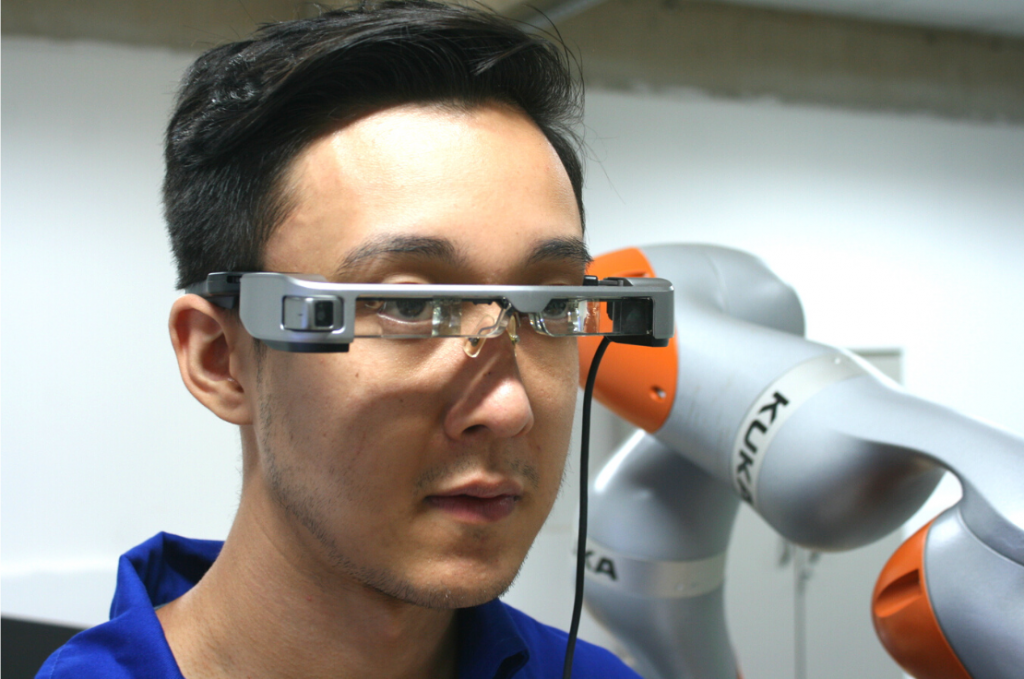
O coordenador do AeroTech informa que, para refinar a visualização e a controlabilidade da neuronavegação na fase de planejamento e durante uma cirurgia, mais um projeto do laboratório, o VCranium, traz a ideia de aplicar a tecnologia de realidade aumentada com o fim de entregar uma interação mais amigável e inteligente do médico com os dados do paciente, em especial as imagens. “Propõe-se o uso de óculos inteligentes, liberando as mãos do médico para atividades de neurocirurgia e ainda entregar informações com o potencial de aumentar a qualidade da operação”, ressalta Caurin. O aprimoramento do cenário cirúrgico virtual tem recebido ainda o apoio da Ontario Tech University, no Canadá.
A implementação do sistema tem como base a conexão sem fio entre um computador e os óculos Epson Moverio BT-350 que, por sua vez, utilizam respectivamente as linguagens de programação Python e o ambiente de desenvolvimento Unity para realizar essa tarefa. Com isso, segundo o professor da EESC-USP, é possível capturar imagens da câmera localizada nos óculos e obter a posição correta da projeção em sobreposição da imagem virtual 3D do cérebro do paciente superposta à cabeça real do paciente. Marcadores ArUco são adotados para realizar o pareamento entre objeto real e as imagens projetadas com o auxílio dos óculos. Protótipos funcionais foram implementados em Tablets e smartphones baseados no sistema operacional Android.
“Os esforços atuais do VCranium se concentram na calibração e avaliação do resultado das projeções. Isto é, temos que certificar que a sobreposição obtida tenha uma resposta visual consistente e que possamos calcular o erro médio dela. Paralelamente a isso, temos frentes de estudo relacionadas com o cálculo da posição da projeção sem o uso de marcadores utilizando a técnica de Surface Matching usando a tecnologia de câmeras 3D Intel Realsense que, por fim, tem o potencial de trazer mais robustez e facilidade para a operação do sistema”, completa Caurin.
A Fundação de Amparo à Pesquisa do Estado de São Paulo (FAPESP) apoiou essas iniciativas do AeroTech Lab, assim como alunos de iniciação científica envolvidos nos projetos.
Alexandre Milanetti, para a Assessoria de Comunicação Institucional da EESC